

Im Rahmen eines Entwicklungsprojektes welches von Marc Toussaint der Machine-Learning-Gruppe der TU Berlin ausging, wurde von Konstruktiv ein modulares Antriebssystem entwickelt. Das Herzstück dieses Systems ist das HoloDrive – ein einzelnes, angetriebenes und lenkbares “Rad” welches im Verbund von mehreren HoloDrives zum Antrieb von Roboterplattformen verwendet werden soll.
Die Entwicklung des HoloDrive ist von Grund auf in Richtung Open-Source-Lizenzierung und möglichst einfachen und preisgünstigen Nachbau ausgerichtet: Es werden weitgehend einfach erhältliche Fertigteile verwendet und diese mittels einfacher Verfahren nachbearbeitet. Als Grundgerüst der Konstruktion dienen Blechbiegeteile.
Die Namensgebung des HoloDrives orientiert sich am “holonomen Antrieb”, welcher freie Bewegungen in alle Richtungen ermöglicht.
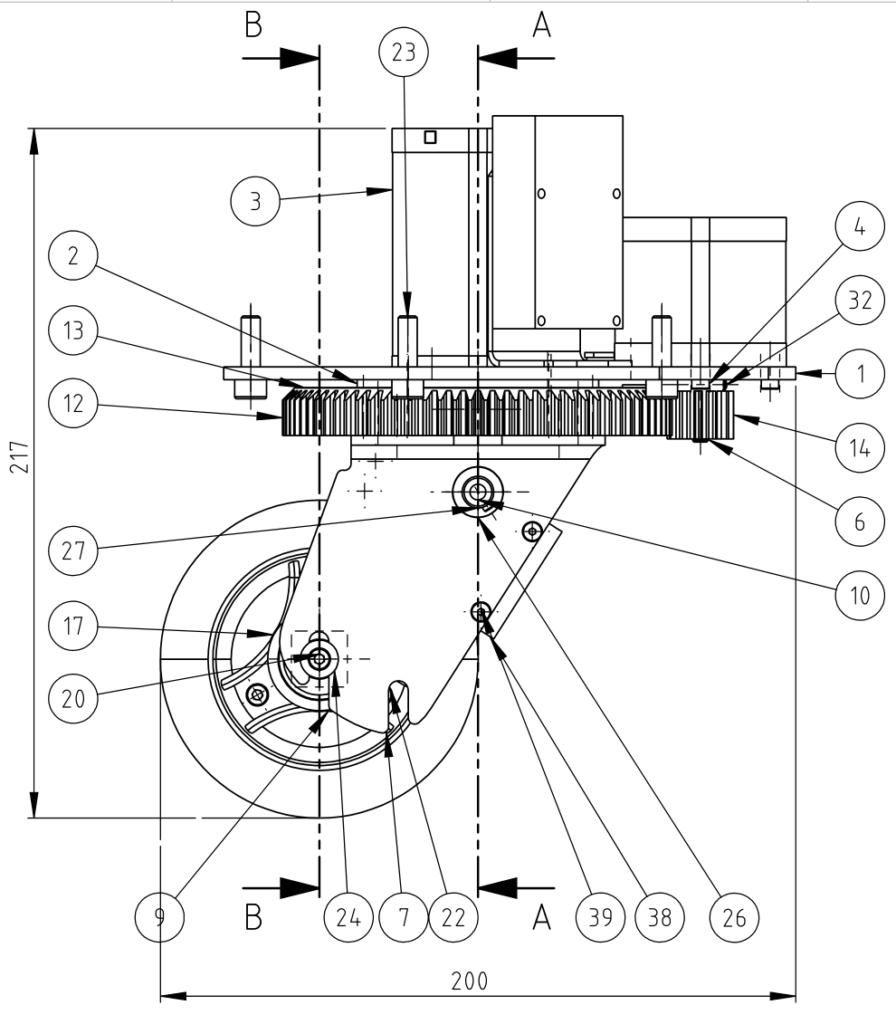
Jedes HoloDrive wird von zwei Motoren angetrieben. Beide Motoren stehen fest, wobei die gewählte Anordnung von Lagerung und Getriebe gewährleistet, dass sich die Lenk- sowie die Antriebsachse ohne Begrenzungen frei drehen lassen und keinerlei bewegte Kabelverbindungen nötig sind.

Durch die Verwendung von Brushless-DC-Motoren mit Encodern und VESC-Motortreibern sind eine möglichst exakte Positionierung der beiden Motoren sowie hohe Geschwindigkeiten und Drehmomente gewährleistet. Die Verwendung dieser Motoren ermöglicht außerdem das System zu “schieben”, so dass es beim Zusammentreffen mit Hindernissen zu einer Interaktion mit der Umwelt kommen kann.

Auf Wunsch des Auftraggebers hat die Rad-Achse einen Nachlauf zur Lenkachse.
Jedes der HoloDrives ist für eine Last bis zu 20 kg ausgelegt und erreicht bei dieser Last dauerhaft Beschleunigungen von höher als 1 m/s² und Geschwindigkeiten höher als 1 m/s. Durch kurzzeitigen Spitzenlastbetrieb der BLDC-Motoren sind höhere Werte ohne weiteres erreichbar. Die VESC-Treiber werden über einen CAN-Bus gesteuert, über diesen können auch aktuellen Messwerte wie Position und Geschwindigkeit zum Steuercomputer übertragen werden.
